这是正在学的 Games 101 图形学入门课程笔记,自己看的。在此留档,做测试和复习。
持续更新,欢迎评论!!!
Lecture 01 Introduction
- GAMES: Graphics And Mixed Environment Symposium
- Rasterization 光栅化
- online 实时渲染 30fps
- offline 离线渲染
- Curves and Meshes 曲线和曲面
- Ray Tracing 光线追踪 慢但是真实
- Trade of 取舍
- 可以实时光线追踪
- Animation/Simulation 模拟动画仿真
- Games 101 is not about
- using Opengl / DirectX / Vulkan 图形学 api
- the syntac of Shaders
- 学完自然会用
- 3D 建模和游戏开发 3D modeling using Maya / Blender or Unity / Unreal Engine or VR / game development
- Computer Vision / Deep Learning topics 计算机视觉,一切需要理解、猜测、翻译的东西
- Like Opencv
- 图形学:由模型到图像,或者对三维形体的理解和仿真
- 计算机视觉:从图像到模型,或者由图像分析之后生成图像(人脸 gan 生成人脸),三维重建
- 计算摄影学:拍照片的技术,类似计算机视觉
course logistics 课程具体细节
- comprehensive but without hardware programming! without 3090!
- References : Fundamentals of Computer Graphics
- games-cn.org
- Assignment: 有框架和明确描述,c++ 写哦
- 7 次小作业,每次不超过 20 行
- 用 eigen 库做矩阵向量运算
- 所有工业都有 c++ 编程图形学框架
- 提供一个虚拟机来跑,立刻着手开发
- 最后有一个大作业,融会贯通,自己做一个酷炫的东西,课程相关。
- 一定要使用 IDE 集成开发环境,方便
- Windows : Visual Studio, Visual Studio Code (cross platform) , Qt creator
- 不推荐: Clion, Eclipse
- 非常不推荐: Sublime Text, Vi / Vim, Emacs, Notepad++
- geek = genius freak 天才和怪胎
- 学术诚信,代码框架不要给到 github 上,大作业可以发布
- 回答问题不要贴代码,回答问题本身。
Lecture 02 Review of Linear Algebra
向量 vector
- 向量基础知识
- 向量的加减法、点乘、叉乘
- 求两个向量的角度 -> 光栅化技术/光照模型
- 向量投影、向量分解 -> 金属光泽
- 向量叉乘 -> 三维空间的直角坐标系/右手坐标系
- 叉乘 -> 判定向量左右,判定点在三角形内外
- corner case 自己说了算
- 笛卡尔坐标系
矩阵 matrix
- 矩阵变换
- 矩阵一般没有交换律,有结合律,分配律
- y 轴对称矩阵
- 单位矩阵
- 转置矩阵 (AB)t=BtAt
- 矩阵的逆 -> 指挥相机的运动和旋转
Lecture 03 矩阵变换 Transformation
assignment 0
why study transformation
- 镜头移动
- 逆运动学
- 关节移动
- 3d to 2d projection 三维到二维投影
2D Transformations: rotation, scale, shear
均匀缩放矩阵:$\begin{pmatrix} s & 0 \\ 0 & s \end{pmatrix}$ 非均匀缩放矩阵:$\begin{pmatrix} s_x & 0 \\ 0 & s_y \end{pmatrix}$
对称矩阵:$\begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix}$
切变矩阵:$\begin{pmatrix} 1 & a \\ 0 & 1 \end{pmatrix}$
旋转矩阵(默认绕原点逆时针)$R_{\theta} = \begin{pmatrix}cos\theta&&-sin\theta\\ sin\theta&&cos\theta\end{pmatrix}$ 旋转矩阵的逆矩阵:$R_{\theta}^{-1} = \begin{pmatrix}cos\theta&&sin\theta\\ -sin\theta&&cos\theta\end{pmatrix} = R_{\theta}^{T}$ 因此旋转矩阵是正交的
变换的本质:$\begin{pmatrix}x’\\ y’\end{pmatrix} = \begin{pmatrix}a&b\\ c&d\end{pmatrix}\begin{pmatrix}x\\ y\end{pmatrix}$ 既 $\boldsymbol{x’} = M\boldsymbol{x}$
homogeneous coordinate 齐次坐标
- 平移 $\begin{pmatrix}x’\\ y’ \end{pmatrix}= \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix}x \\ y \end{pmatrix} + \begin{pmatrix} t_x \\ t_y \end{pmatrix}$
- alline map 仿射变换
- 有一个多余项,所以试图找到统一的解决方案,但是有代价(trade off / no free lunch theory) $$ \begin{pmatrix} x’ \\ y’ \\ 1 \\ \end{pmatrix} = \begin{pmatrix} a & b & t_x \\ c & d & t_y \\ 0 & 0 & 1 \\ \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \\ \end{pmatrix} $$
- 先变换,后平移
- 2D point = $(x, y, 1)^t$
- 2D vector = $(x, y, 0)^t$
- point diff with vector: vector the same, point diff
- vector + vector = vector
- point - point = vector
- point + vector = point
- point + point = midpoint
- in homogeneous coordinates: $$\begin{pmatrix}x \\ y \\ w \end{pmatrix} = \begin{pmatrix}x/w \\ y/w \\ 1 \end{pmatrix}$$
- Inverse Transition
- Composite Transform 矩阵乘法
- sequence of affine transform 任意点旋转=移到原点,旋转,移动回去
Lecture 04 3D transforms
3D transformations 3 维变换
3D points = $(x, y, z, 1)^T$ or $(x, y, z, w)^T(w \ne 0)$ 3D vector = $(x, y, z, 0)^T$
Scale 缩放
$$ \boldsymbol{S}(s_x, s_y, s_z) = \begin{pmatrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
- Translation 平移
$$ \boldsymbol{T}(t_x, t_y, t_z) = \begin{pmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
- Rotation 旋转(关于某个轴右手螺旋转 $\alpha$ 角)
$$ \boldsymbol{R}_x(\alpha) = \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & cos\alpha & -sin\alpha & 0 \\ 0 & sin\alpha & cos\alpha & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
$$ \boldsymbol{R}_y(\alpha) = \begin{pmatrix} cos\alpha & 0 & sin\alpha & 0 \\ 0 & 1 & 0 & 0 \\ -sin\alpha & 0 & cos\alpha & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
$$ \boldsymbol{R}_z(\alpha) = \begin{pmatrix} cos\alpha & -sin\alpha & 0 & 0 \\ sin\alpha & cos\alpha & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
$$ \boldsymbol{R}_{xyz}(\alpha, \beta, \gamma) = \boldsymbol{R}_x(\alpha) \boldsymbol{R}_y(\beta) \boldsymbol{R}_z(\gamma) $$
Rodrigues’ Rotation Formula
四元数(Quaternion)用作插值
Viewing transformation 观测变换
model / view / projection transformation (mvp transformation)
View / Camera transformation 视图变换
Define the camera
- Position $\vec{e}$
- Look-at / gaze direction $\hat{g}$
- Up direction (for rotation) $\hat{t}$
Default settings
$\vec{e} \rightarrow (0, 0, 0)^T$
,相机位置移到原点
$\hat{g} \rightarrow -Z = (0, 0, -1)^T$,相机看向 Z 轴负方向
$\hat{t} \rightarrow Y = (0, 1, 0)^T$,相机的向上方向为 Y 轴正方向
$\hat{g} \times \hat{t} \rightarrow X = (1, 0, 0)^T$
Transformation 变换方程:
$$ M_{view} = R_{view}T_{view} $$
$$ T_{view} = \begin{pmatrix} 1 & 0 & 0 & -x_e \\ 0 & 1 & 0 & -y_e \\ 0 & 0 & 1 & -z_e \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
$$ R_{view} = \begin{pmatrix} x_{\hat{g} \times \hat{t}} & x_{\hat{g} \times \hat{t}} & z_{\hat{g} \times \hat{t}} & 0 \\ x_{\hat{t}} & y_{\hat{t}} & z_{\hat{t}} & 0 \\ x_{-\hat{g}} & y_{-\hat{g}} & z_{-\hat{g}} & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
Projection transformation 投影变换
- 3D to 2D
Orthographic projection 正交变换
特征
无近大远小关系,假设相机无限远,平行的投影到某平面内
多用于工程制图
逻辑上,丢掉 Z 轴方向,所有内容挤在 xy 平面上
步骤
目标:把一个大立方体 $[l,r]\times[b,t]\times[f,n]$ 平移并压缩到 canonical cube(正则、规范、标准立方体)$[-1, 1]^3$ 里面,由于我们看向 -Z 方向,所以坐标上 $Far < Near < 0$,也是为什么OpenGL等一些图形API用左手系。
先平移中心点到原点
$$ \begin{pmatrix} 1 & 0 & 0 & -\frac{r+l}{2} \\ 0 & 1 & 0 & -\frac{t+b}{2} \\ 0 & 0 & 1 & -\frac{n+f}{2} \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
再缩放到 $[-1, 1]^3$ :
$$ \begin{pmatrix} \frac{2}{r-l} & 0 & 0 & 0 \\ 0 & \frac{2}{t-b} & 0 & 0 \\ 0 & 0 & \frac{2}{n-f} & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
总变换矩阵:
$$ M_{ortho} = \begin{pmatrix} \frac{2}{r-l} & 0 & 0 & 0 \\ 0 & \frac{2}{t-b} & 0 & 0 \\ 0 & 0 & \frac{2}{n-f} & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & -\frac{r+l}{2} \\ 0 & 1 & 0 & -\frac{t+b}{2} \\ 0 & 0 & 1 & -\frac{n+f}{2} \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} = \begin{pmatrix} \frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l} \\ 0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b} \\ 0 & 0 & \frac{2}{n-f} & -\frac{n+f}{n-f} \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$
问题:
- 当被缩放到 $[-1, 1]^3$ 之后,原本物体被拉伸。之后会做一次视口变换,保证物体尺寸合适。
- 变换坐标系不好理解,不直观
- 输入给定
- 精度问题
Perspective projection 透视变换
特征
- 有近大远小关系,假设相机有限远,形成锥形投影到某平面内
- 视觉上平行线不再平行
步骤推导合理性,而非严格证明
直观上,先把 $(n,f]$ 平面挤压:把锥体挤压成长方体,其中 $n \rightarrow n, f \rightarrow f, M_{persp \rightarrow ortho}$
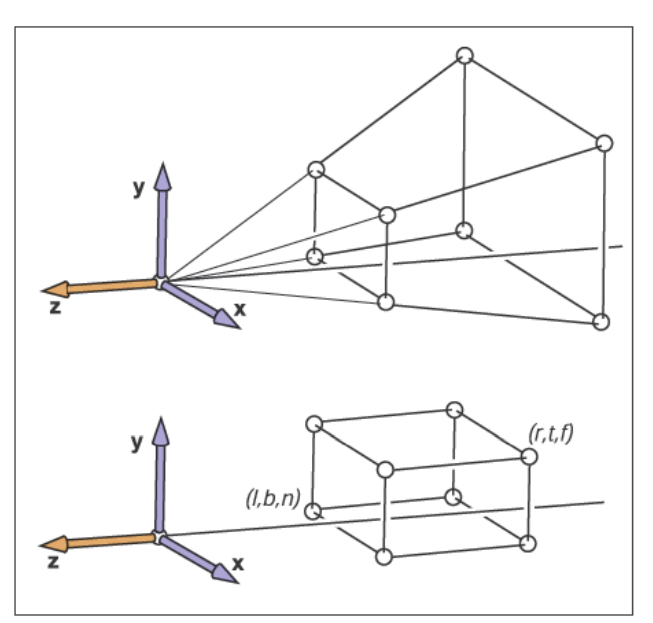
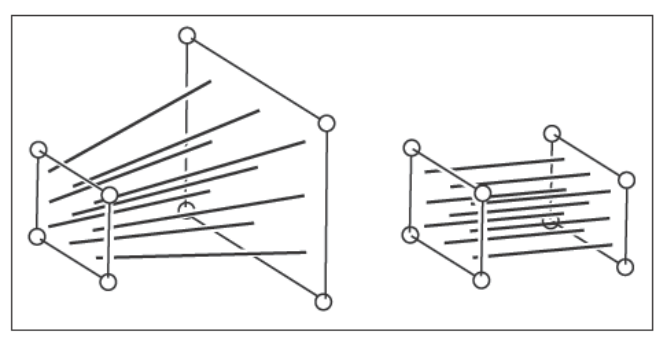
规定:
- 近平面里任何个点不变
- 远平面位置不变,但是向中心收缩,且中心点不变
设近平面上一点 $(x’, y’, z’)$ 和远平面(或者内部某个平面)上一点 $(x, y, z)$ 在一条直线上,由相似三角形关系有 $y’=\frac{n}{z}y$,且 $x’=\frac{n}{z}x$,则由其次坐标表示之后
$$ \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} \Rightarrow \begin{pmatrix} \frac{nx}{z} \\ \frac{ny}{z} \\ unknown \\ 1 \end{pmatrix} == \begin{pmatrix} nx \\ ny \\ unknown \\ z \end{pmatrix} $$
可以得到: $$ M_{persp \rightarrow ortho} = \begin{pmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ ? & ? & ? & ? \\ 0 & 0 & 1 & 0 \\ \end{pmatrix} $$
近平面上的点不会变,即
$$ \begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix} \Rightarrow \begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix} == \begin{pmatrix} nx \\ ny \\ n^2 \\ n \end{pmatrix} $$
因为第三行乘积得到 $n^2$,所以 $M_{persp \rightarrow ortho}$ 第三行只能是 $\begin{pmatrix} 0 & 0 & A & B \end{pmatrix}$,其中 A 和 B 未知。
$$ \begin{pmatrix} 0 & 0 & A & B \end{pmatrix} \begin{pmatrix} x \\ y \\ n \\ 1 \\ \end{pmatrix} = n^2 \Rightarrow An + B = n^2 $$
此时弹幕提出问题,说如果是形如 $\begin{pmatrix} \frac{pn^2}{x} & \frac{qn^2}{y} & A & B \end{pmatrix}$ 的形式(其中 $p, q$ 为常数),也可以得到右边只有 $n^2$ 的形式。实际上不可能,因为左式是变换矩阵,一定是一个常量矩阵,不能含有 $x, y$ 等变量。
同理,远平面上的 z 参数不发生变化,考虑中间的 $(0, 0)$ 点不变,即
$$ \begin{pmatrix} 0 \\ 0 \\ f \\ 1 \end{pmatrix} \Rightarrow \begin{pmatrix} 0 \\ 0 \\ f \\ 1 \end{pmatrix} == \begin{pmatrix} 0 \\ 0 \\ f^2 \\ f \end{pmatrix} \Rightarrow Af+B=f^2 $$
解方程可得
$$ \begin{cases} A = n + f \\ B = -nf \\ \end{cases} $$
则
$$ M_{persp \rightarrow ortho} = \begin{pmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n + f & -nf \\ 0 & 0 & 1 & 0 \\ \end{pmatrix} $$
再正交变换到 $[-1, 1]^3$
$$ M_{persp} = M_{ortho}M_{persp \rightarrow ortho} \\ = \begin{pmatrix} \frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l} \\ 0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b} \\ 0 & 0 & \frac{2}{n-f} & -\frac{n+f}{n-f} \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} \begin{pmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n + f & -nf \\ 0 & 0 & 1 & 0 \\ \end{pmatrix} \\ = \begin{pmatrix} \frac{2n}{r-l} & 0 & -\frac{r+l}{r-l} & 0 \\ 0 & \frac{2n}{t-b} & -\frac{t+b}{t-b} & 0 \\ 0 & 0 & \frac{n+f}{n-f} & -\frac{2nf}{n-f} \\ 0 & 0 & 1 & 0 \\ \end{pmatrix} $$
问题:对于中间的任何一个点 $(x, y, z)$, $z$ 会靠近近平面还是靠近远平面?值变大还是变小?
$$ z’=\frac{n+f}{n-f}z-\frac{2nf}{n-f} \\ z’-z=\frac{2f(z-n)}{n-f}>0 \\ 0 > n > z’ > z > f $$
答:靠近,变大
特殊的,当 $l=-r,b=-t$ 时:
$$ M_{persp} = \begin{pmatrix} \frac{n}{r} & 0 & 0 & 0 \\ 0 & \frac{n}{t} & 0 & 0 \\ 0 & 0 & \frac{n+f}{n-f} & -\frac{2nf}{n-f} \\ 0 & 0 & 1 & 0 \\ \end{pmatrix} $$
Lecture 05 Rasterization 1 (Triangle)
BBS上讨论很踊跃,提问的艺术
透视投影之后,就是把物体画到屏幕上,这时就是光栅化技术
定义两个概念:
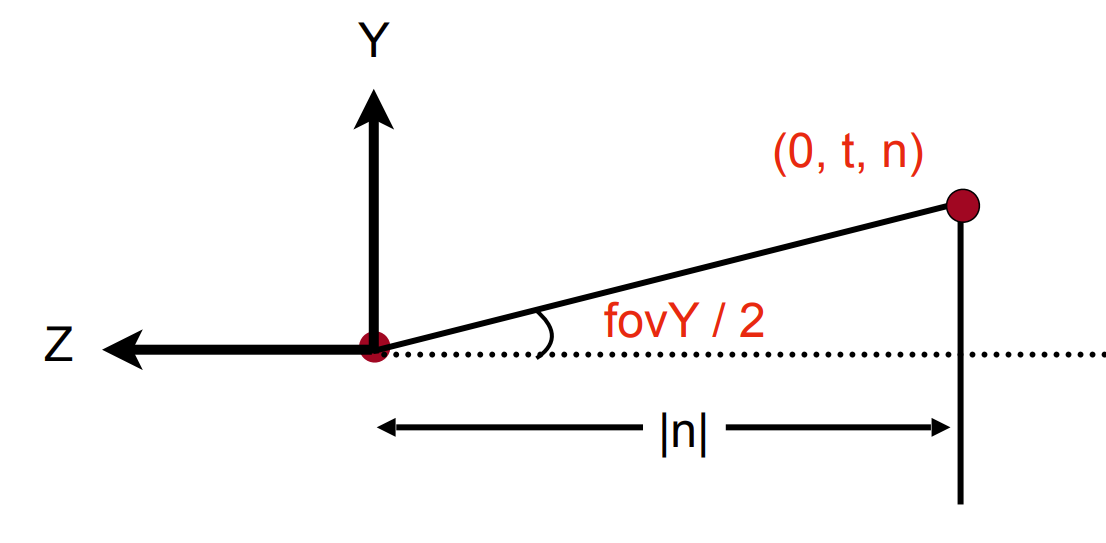
- 长宽比 aspect ratio = width / height
- (垂直的)可视角度 vertical field-of-view fovY,和水平的可视角度可以相互转化
和变换一样,已知 $(r, l),(t, b),(n,f)$ 六个参数,要把长宽比和可视角度用这六个参数表示(假设屏幕中心对称,即 $l=-r,b=-t$ )
$$
\tan{\frac{fovY}{2}}=\frac{t}{\lvert n \rvert}
\\
aspect=\frac{r}{t}
$$
screen 屏幕
定义:
- 一个像素形成的数组
- 数组的大小取决于分辨率(如 1920 × 1080 )
- 一种光栅成像设备(raster display,raster 是德语中 screen 的意思)
像素:
- 同一色彩的最小单位
- 一个像素可以用 $(R, G, B)$ 表示
- 像素的坐标用 $(x, y)$ 整数表示,下表范围是 $[(0,0),(width-1,height-1)]$ ,中心点在 $(x+0.5,y+0.5)$ ,覆盖了 $(0,0)-(width,height)$
保持 $z$ 不变,把 $[-1,1]^2$ 拉伸到 $[0,width] \times [0,height]$ ,称之为视口变换: $$ \begin{pmatrix} \frac{width}{2} & 0 & 0 & \frac{width}{2} \\ 0 & \frac{height}{2} & 0 & \frac{height}{2} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} $$ 仍然是空间中三角形、多边形等信息,接下来就要离散化成为像素。
绘图机器 Drawing Machine
比如打印机、绘图机机器人、激光切割等
不同的光栅化显示设备
- 示波器 Oscilioscope
- 阴极射线管显示器 Cathode Ray Tube CRT ,比较伤眼睛
- 为了画的块,可以隔行扫描,利用人眼视觉暂留
- 但是隔行扫描可能会造成严重的画面撕裂,尤其对于高速运动的视频
- 显示器,通过内存或显存中的一块区域映射到屏幕上,叫做 Frame Buffer
- 平板显示设备
- 低分辨率 LCD 显示器
- 手机:高分辨率 LCD 显示器,视网膜屏幕
- OLED 显示器等等
- LCD (Liquid Crystal Display)液晶显示设备
- 液晶的排布影响光的偏振方向,本质上是圆偏振光,来控制出光亮
- LED (Light emitting diode)Array Display 发光二极管
- 电子墨水屏,控制黑墨水和白墨水的朝向,刷新率很低
用三角形作为模型的基础单元
为什么用三角形:
- 多边形都可以又三角形组成
- 三角形内部一定是平面,不会有凹凸
- 三角形内外定义明确,容易(用叉积)判断点是否在三角形内部
- 三角形内部插值
采样 Sampling
采样:函数离散化的方法
采样是图形学里很重要的概念,时间、区域、位置、物体表面反射等性质都需要采样
取一个平面内三角形,定义一个函数来判断一个像素中心点是否在三角形内,这是一种采样
| |
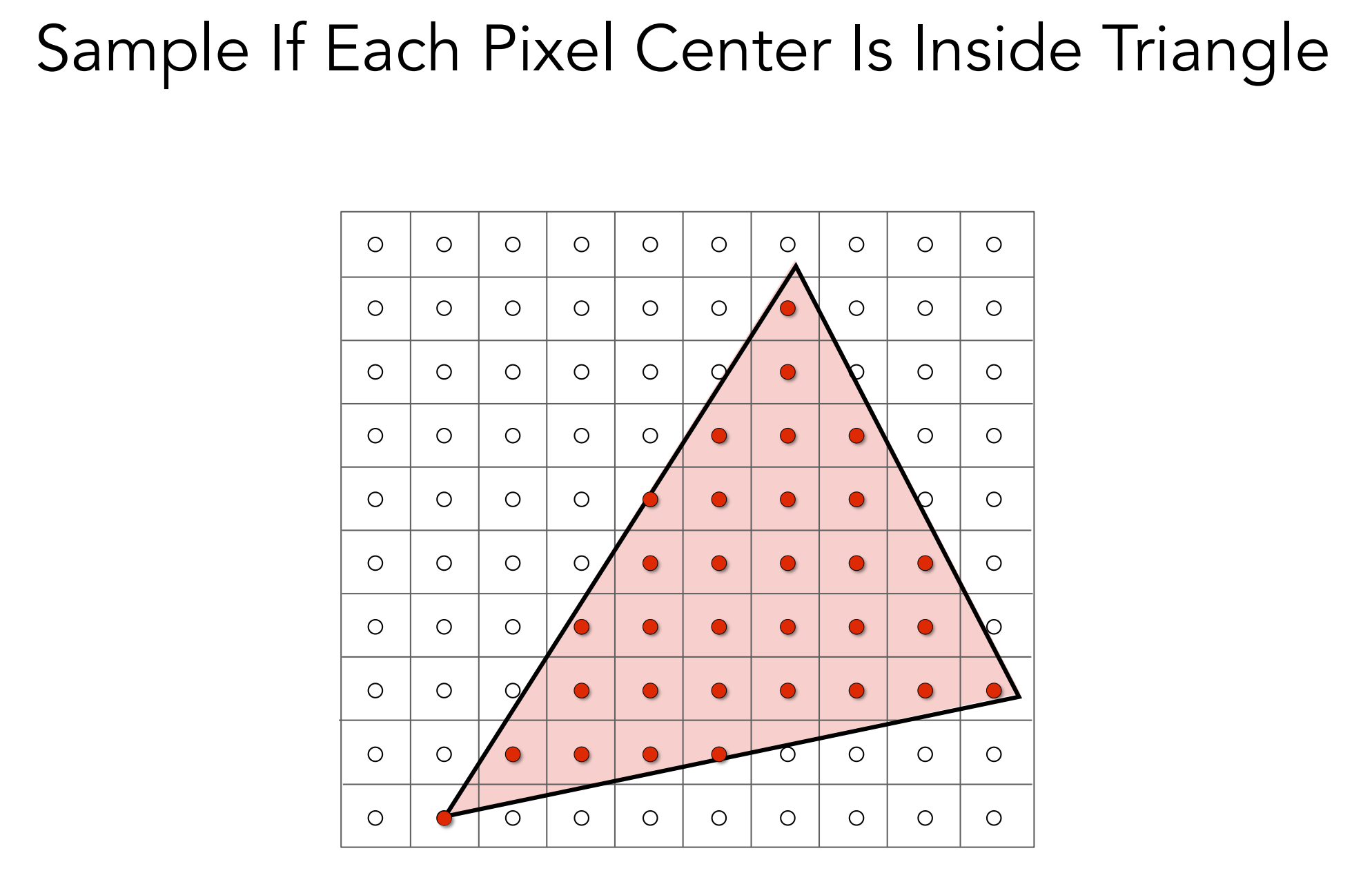
inside函数的实现:应用叉乘的性质。定义三角形 $\triangle P_0P_1P_2$ ,顶点逆时针方向排布;定义一个判断的点 $Q$。如果下列条件都满足:
$$
z(\vec{P_0P_1} \times \vec{P_0Q}) > 0 \\
z(\vec{P_1P_2} \times \vec{P_1Q}) > 0 \\
z(\vec{P_2P_0} \times \vec{P_2Q}) > 0 \\
$$
则点 $Q$ 在三角形 $\triangle P_0P_1P_2$ 内,否则在三角形外。或者三角形顺时针定义,若以上全部小于零,则在三角形内。
如果一个点在三角形边界上,在这门课上不做处理,在其他的地方可能会特殊处理,比如在OpenGL等图形学API上有严格的定义(规范)。
优化:可以用三角形的轴向包围盒(axis-aligned Bounding Box,缩写AABB)来优化循环。
更优化:取每一行的轴向包围和,适用于旋转45度而且窄长的三角形
实际上的像素排列
三星 OLED 钻石排列中,红色:蓝色:绿色=1:1:2,因为人对于绿色最敏感
问题
如果仅仅会出现走样或锯齿(Aliasing or Jaggies),所以图形学的一大重点就在于抗锯齿或者反走样,这是下节课的内容
Lecture 06 Rasterization 2 (Antialiasing and Z-Buffering)
上节课使用采样技术,会出现明显的锯齿(jaggies)
采样理论 Sampling
照片:对于到达传感器的光照信息采样
视频:在时间中采样(动画定义在帧上)
采样瑕疵 Sampling Artifacts
- 锯齿 Jaggies
- 摩尔纹 Moire Pattern:删除奇数行和奇数列并且缩放到原来大小
- 人眼在时间中的采样,跟不上旋转的速度(顺时针变逆时针、原力直升机等)
本质上就是信号的变化太快,采样跟不上
反走样思路
滤波
在采样之前,做一个模糊(滤波)操作,用来抗锯齿(反走样)
先采样再模糊(Blutted Aliasing),不行!
原理
频域 Frequency Domain
定义频率 $f$,有 $\cos{2\pi fx}$,$f=\frac{1}{T}$。
傅里叶展开:$f(x)=\frac{a_0}{2}+\sum_{n=1}^{+\infty}[{a_n \cos{n\omega t}}+ {b_n \sin{n\omega t}}]$,任何一个函数都能分解成不同的频率(频率从低到高的形式)
傅里叶展开和傅里叶变换紧密相连,对于固定的采样频率,低频信号采样能恢复,高频信号采样可能不能恢复,而是变成低频信号。采样频率和信号频率紧密相关。
走样:两种频率的信号采样得到完全一样的结果,叫做走样。(Alisaing 相似)
滤波 filter
定义:删除特定频率的信号。傅里叶变换可以把时域变到频域。傅里叶变换一张图会发现,低频信息非常多,集中在中间,高频信息非常少,分散在四周。频谱。
高通滤波器:删除低频信号,得到高频信号。用于提取人物边界(人物与背景的边缘信息)。
低通滤波器(blur):删除高频信号,得到低频信号。用于模糊信息(马赛克,磨皮等等)。
高通低通滤波器:删除高低频信息,得到中频信息。
《数字图像处理》
目前多数的图像操作是机器学习。
滤波 Filtering = 平均 Averaging = 卷积 Convolution
卷积
定义一个一位数组,有一个窗口在数组上滑动。窗口的定义为:
| |
类似于做一个平均,这个窗口叫卷积核。卷积滤波 = 均值滤波
卷积定理:时域的卷积等于频域的乘积
Box Filter 盒子滤波器 = 低通滤波器
盒子时域变大了,盒子的频域变小了。用越大的卷积核去做卷积操作,基本上都一样了,说明低频信号多,高频信号少。
采样
采样就是重复原始信号频域上的内容。
对于任意一个函数,乘以冲击函数 $P_{\theta}(t)$
为什么会产生走样现象(奈奎斯特采样定律):时域上采样的间隔变大(变慢),频域上复制的间隔变小,会有频率重叠(混叠)在一起,导致走样。
反走样
增加采样率
增加分辨率,1080P -> 4k。
低通滤波器
先把一个信号高频信息拿掉,再采样。
实际上对边缘做卷积。比如取个 3*3 的方格作为低通滤波器,对采样函数 f(x, y) 做卷积操作,
实际上
MSAA
Multisample Antialiasing 多重采样反走样(超采样),解决信号模糊操作,隐含的最后的采样操作。
原理:在一个像素中间多加几个采样点,应用采样函数,然后去平均。例如。如果一个像素覆盖0, 1, 2, 3, 4个采样点,就用对应的灰度值来填充像素。本质上是软件上的增加分辨率。
代价:超采 $n$ 倍,增大到 $n^2$ 倍的计算量。
工业界
用不同的样本分布,多个采样点可以复用。
FXAA
Fast Approximate AA 快速近似反走样。(先采样,找到边界,换成没有锯齿的边界)
TAA
Temporal AA 时间反走样。(复用上一帧的的边界,适用于静态变化的图像)
超分辨率
从低分辨率到高分辨率,要解决低分辨率下采样不够的问题。
DLSS
Deep Learning Super Sampling 深度学习超分辨率。
深度学习 = 猜。